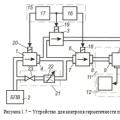
نقشه های دستکاری ربات را خودتان انجام دهید. دستکاری ربات صنعتی: من می توانم همه چیز را انجام دهم و همه چیز را می توانم انجام دهم. یک ربات صنعتی چگونه کار می کند
اول تحت تاثیر قرار خواهد گرفت مسائل کلی، بعد از مشخصات فنینتیجه، جزئیات و در نهایت خود فرآیند مونتاژ.
به طور کلی و کلی
ایجاد این دستگاهبه طور کلی، نباید هیچ مشکلی ایجاد کند. لازم است فقط در مورد امکاناتی که اجرای آنها از نظر فیزیکی بسیار دشوار است ، از نظر کیفی فکر کنید تا دست دستکاری وظایف محول شده به آن را انجام دهد.
مشخصات فنی نتیجه
نمونه ای با پارامترهای طول / ارتفاع / عرض به ترتیب 228/380/160 میلی متر در نظر گرفته می شود. وزن ساخته شده تقریباً 1 کیلوگرم خواهد بود. برای کنترل سیمی استفاده می شود از راه دور... زمان تخمینی مونتاژ با تجربه حدود 6-8 ساعت است. اگر آنجا نباشد، ممکن است روزها، هفته ها و با همدستی و ماه ها طول بکشد تا بازوی دستکاری مونتاژ شود. با دستان خود و در چنین مواردی، ارزش آن را دارد که فقط برای منافع خود انجام دهید. برای حرکت قطعات از موتورهای کلکتور استفاده می شود. با تلاش کافی می توانید دستگاهی بسازید که 360 درجه بچرخد. همچنین برای راحتی کار، علاوه بر ابزارهای استاندارد مانند لحیم کاری و لحیم کاری، باید موارد زیر را نیز تهیه کنید:
- انبر بینی بلند.
- برش های جانبی.
- پیچ گوشتی فیلیپس.
- 4 عدد باتری D.
کنترل از راه دور با استفاده از دکمه ها و میکروکنترلر قابل اجرا است. اگر می خواهید یک کنترل بی سیم از راه دور بسازید، یک عنصر کنترل عمل نیز در دست دستکاری کننده مورد نیاز است. به عنوان اضافات، تنها به دستگاه هایی (خازن، مقاومت، ترانزیستور) نیاز خواهد بود که مدار را تثبیت کرده و جریان را با مقدار مورد نیاز از طریق آن در زمان های مناسب منتقل می کند.
قطعات کوچک

برای تنظیم تعداد دور، می توانید از چرخ های انتقال استفاده کنید. آنها به شما این امکان را می دهند که حرکت بازوی دستکاری را صاف کنید.
همچنین باید مطمئن شوید که سیم ها حرکت او را پیچیده نمی کنند. قرار دادن آنها در داخل ساختار بهینه خواهد بود. شما می توانید همه چیز را از بیرون انجام دهید، این رویکرد باعث صرفه جویی در زمان می شود، اما به طور بالقوه می تواند منجر به مشکلاتی در جابجایی گره های فردی یا کل دستگاه شود. و اکنون: چگونه یک دستکاری بسازیم؟
مجمع به طور کلی

اکنون مستقیماً به ساخت بازوی دستکاری کننده می رویم. از پایین شروع می کنیم. باید امکان چرخش دستگاه در تمام جهات وجود داشته باشد. تصمیم خوبروی یک پلت فرم دیسکی قرار می گیرد که با استفاده از یک موتور به صورت چرخشی تنظیم می شود. برای اینکه بتواند در هر دو جهت بچرخد، دو گزینه وجود دارد:
- نصب دو موتور. هر یک از آنها مسئول چرخش در جهت خاصی خواهند بود. وقتی یکی کار می کند، دیگری در حال استراحت است.
- نصب یک موتور با مداری که می تواند آن را در هر دو جهت بچرخاند.
کدام یک از گزینه ها را انتخاب کنید فقط به شما بستگی دارد. بعد، ساخت و ساز اولیه انجام می شود. برای راحتی کار، دو "مفاصل" مورد نیاز است. متصل به پلت فرم باید قادر به کج شدن در جهات مختلف باشد که با کمک موتورهای قرار داده شده در پایه آن حل می شود. یک یا یک جفت دیگر باید در خم آرنج قرار گیرد تا بخشی از چنگال را بتوان در امتداد خطوط افقی و عمودی سیستم مختصات حرکت داد. علاوه بر این، اگر می خواهید حداکثر توانایی را داشته باشید، می توانید موتور را در محل مچ دست نیز نصب کنید. علاوه بر این، ضروری ترین، که بدون آن بازوی دستکاری کننده قابل تصور نیست. با دستان خود باید دستگاه گیره را خود بسازید. گزینه های زیادی برای پیاده سازی وجود دارد. می توانید در مورد دو مورد از محبوب ترین آنها راهنمایی کنید:
- فقط از دو انگشت استفاده می شود که به طور همزمان شیء در دست را فشار داده و باز می کند. این ساده ترین پیاده سازی است که با این حال، معمولاً نمی تواند ظرفیت بار قابل توجهی را به رخ بکشد.
- نمونه اولیه دست انسان در حال ساخت است. در اینجا می توان از یک موتور برای همه انگشتان استفاده کرد که با کمک آن خم / خم شدن انجام می شود. اما می توانید طراحی را پیچیده تر کنید. بنابراین، می توانید یک موتور را به هر انگشت متصل کنید و آنها را جداگانه کنترل کنید.
در مرحله بعد، ساخت یک کنترل از راه دور باقی مانده است که با کمک آن موتورهای فردی و سرعت کار آنها تحت تأثیر قرار می گیرد. و می توانید آزمایشات را با استفاده از یک بازوی رباتیک که با دستان خود ساخته شده است شروع کنید.
نمایش شماتیک ممکن از نتیجه

فرصت های فراوانی برای اختراعات خلاقانه فراهم می کند. بنابراین، چندین پیاده سازی به شما ارائه می شود که می تواند مبنایی برای ایجاد دستگاه خود برای چنین هدفی باشد.
هر طرح ارائه شده از دستکاری کننده را می توان بهبود بخشید.
نتیجه

نکته مهم در رباتیک این است که محدودیت کمی برای بهبود عملکرد وجود دارد یا هیچ محدودیتی وجود ندارد. بنابراین، در صورت تمایل، خلق یک اثر هنری واقعی کار دشواری نخواهد بود. صحبت کردن در مورد راه های ممکنبرای بهبود بیشتر، جرثقیل لودر باید مورد توجه قرار گیرد. ساخت چنین وسیله ای با دستان خود دشوار نخواهد بود؛ در عین حال به شما این امکان را می دهد که کودکان را به کارهای خلاقانه، علم و طراحی عادت دهید. و این به نوبه خود می تواند تأثیر مثبتی بر آنها داشته باشد زندگی آینده... آیا ساختن جرثقیل لودر با دستان خود دشوار خواهد بود؟ این مسئله آنقدرها هم که در نگاه اول به نظر می رسد مشکل ساز نیست. مگر اینکه ارزش مراقبت از وجود قطعات کوچک اضافی مانند کابل و چرخ هایی را داشته باشد که در امتداد آن می چرخد.
از ویژگی های این ربات بر روی پلتفرم آردوینو می توان به پیچیدگی طراحی آن اشاره کرد. بازوی رباتیک از اهرم های زیادی تشکیل شده است که به آن اجازه می دهد در تمام محورها حرکت کند، اشیاء مختلف را فقط با استفاده از 4 موتور سروو حرکت دهد. گردآوری با دستان خودمچنین رباتی قطعا می توانید دوستان و عزیزان خود را با قابلیت ها و ظاهر دلپذیر این دستگاه شگفت زده کنید! به یاد داشته باشید که همیشه می توانید از محیط گرافیکی ما RobotON Studio برای برنامه نویسی استفاده کنید!
اگر سوال یا نظری دارید، ما همیشه در تماس هستیم! نتایج خود را ایجاد کرده و به اشتراک بگذارید!
ویژگی ها:
برای مونتاژ یک بازوی رباتیک با دستان خود، به چندین جزء نیاز دارید. قسمت اصلی توسط قطعات پرینت سه بعدی اشغال شده است، حدود 18 قطعه وجود دارد (چاپ اسلاید اختیاری است) اگر هر آنچه را که نیاز دارید دانلود و چاپ کرده باشید، به پیچ، مهره و لوازم الکترونیکی نیاز خواهید داشت:
- 5 پیچ M4 20mm، 1 x 40mm و مهره های مربوطه با محافظ ضد پیچ خوردگی
- 6 پیچ M3 10mm، 1 x 20mm و مهره های مربوطه
- تخته نان با سیم های اتصال یا سپر
- آردوینو نانو
- 4 سروو موتور SG 90
پس از مونتاژ بدنه، مهم است که از حرکت آزاد آن مطمئن شوید. اگر گره های کلیدی روبوهند به سختی جابجا شوند، سروو موتورها ممکن است قادر به تحمل بار نباشند. هنگام مونتاژ قطعات الکترونیکی، باید به خاطر داشت که بهتر است پس از بررسی کامل اتصالات، مدار را به منبع تغذیه وصل کنید. برای جلوگیری از آسیب به درایوهای سروو SG 90، در صورت عدم نیاز، نیازی به چرخاندن موتور با دست ندارید. اگر نیاز به توسعه SG 90 دارید، باید شفت موتور را به آرامی در جهات مختلف حرکت دهید.
مشخصات فنی:
- برنامه نویسی ساده به دلیل وجود تعداد کمی موتور و از یک نوع
- نقاط مرده برای برخی از درایوهای سروو
- کاربرد گسترده ربات در زندگی روزمره
- کار مهندسی جالب
- لزوم استفاده از پرینتر سه بعدی
این مقاله یک راهنمای مقدماتی برای ایجاد یک مبتدی است بازوهای رباتیککه با آردوینو برنامه ریزی شده اند. مفهوم این است که طراحی بازوی رباتیک ارزان و آسان برای مونتاژ خواهد بود. ما یک نمونه اولیه ساده با کدی که میتواند و باید بهینهسازی شود، گرد هم میآوریم، این یک شروع عالی برای شما در رباتیک خواهد بود. بازوی ربات آردوینو توسط یک جوی استیک هک شده کنترل میشود و میتوان آن را طوری برنامهریزی کرد که دنبالهای از اقداماتی که شما مشخص کردهاید را تکرار کند. اگر در برنامه نویسی خوب نیستید، می توانید پروژه را به عنوان آموزش مونتاژ سخت افزار در نظر بگیرید، کد من را در آن بریزید و دانش اولیه را بر اساس آن کسب کنید. باز هم، پروژه بسیار ساده است.
این ویدیو یک دمو با ربات من را نشان می دهد.
مرحله 1: فهرست مواد



نیاز داریم:
- برد آردوینو. من از Uno استفاده کرده ام، اما هر کدام از طعم ها این کار را به خوبی انجام می دهد.
- Servos، 4 ارزان ترین که پیدا خواهید کرد.
- مواد برای مورد به سلیقه شما. چوب، پلاستیک، فلز، مقوا انجام خواهد شد. پروژه من از یک دفترچه یادداشت قدیمی ساخته شده است.
- اگه نمیخوای زحمت بکشی تخته مدار چاپی، به تخته نان نیاز دارید. هیئت مدیره انجام خواهد داد اندازه کوچک، به دنبال گزینه هایی با جامپر و منبع تغذیه باشید - آنها بسیار ارزان هستند.
- چیزی برای پایه دست - من از قوطی قهوه استفاده کردم که بهترین گزینه نیست، اما این تمام چیزی بود که در آپارتمان پیدا کردم.
- نخ ریز برای مکانیزم بازو و سوزن برای ایجاد سوراخ.
- چسب و نوار چسب برای نگه داشتن آن در کنار هم. با چسب و چسب حرارتی چیزی وجود ندارد که نتوان آن را به هم چسباند.
- سه مقاومت 10K اگر مقاومت ندارید، پس راه حلی برای چنین مواردی در کد وجود دارد بهترین گزینهمقاومت خواهد خرید.
مرحله 2: چگونه کار می کند






شکل پیوست اصل دست را نشان می دهد. من هم همه چیز را با کلمات توضیح خواهم داد. دو قسمت دست توسط یک نخ نازک به هم متصل می شوند. وسط نخ به سروو دست وصل می شود. وقتی سروو نخ را می کشد، دست منقبض می شود. من بازویم را با فنر توپی نصب کردم، اما اگر مواد انعطاف پذیرتری دارید، می توانید از آن استفاده کنید.
مرحله 3: تغییر جوی استیک

با فرض اینکه کار مونتاژ مکانیزم بازو را تمام کرده اید، به قسمت جوی استیک می پردازم.
برای این پروژه از یک جوی استیک قدیمی استفاده شد، اما در اصل هر دستگاهی که دکمه داشته باشد این کار را انجام می دهد. دکمه های آنالوگ (قارچ ها) برای کنترل سروو استفاده می شوند، زیرا در اصل آنها فقط پتانسیومتر هستند. اگر جوی استیک ندارید، میتوانید از سه پتانسیومتر معمولی استفاده کنید، اما اگر مانند من، جوی استیک قدیمی را خودتان اصلاح کنید، این چیزی است که باید انجام دهید.
من پتانسیومترها را وصل کردم تخته نان، هر کدام سه پایانه دارند. یکی از آنها باید به GND وصل شود، دومی از + 5 ولت به آردوینو و وسط به ورودی که بعداً تعریف خواهیم کرد. ما از محور Y در پتانسیومتر سمت چپ استفاده نخواهیم کرد، بنابراین فقط به پتانسیومتر بالای جوی استیک نیاز داریم.
در مورد سوئیچ ها، یک سر + 5 ولت و سیمی که به ورودی دیگر آردوینو می رود به سر دیگر وصل کنید. جوی استیک من یک خط مشترک + 5 ولت برای همه سوئیچ ها دارد. من فقط 2 دکمه را وصل کردم، اما در صورت لزوم یکی دیگر را وصل کردم.
همچنین بریدن سیم هایی که به تراشه می روند (دایره سیاه روی جوی استیک) مهم است. وقتی همه موارد بالا را کامل کردید، می توانید سیم کشی را شروع کنید.
مرحله 4: سیم کشی دستگاه ما

عکس سیم کشی دستگاه را نشان می دهد. پتانسیومترها اهرم هایی روی جوی استیک هستند. Elbow محور Y راست، Base محور X راست، Shoulder محور X چپ است. اگر میخواهید جهت حرکت سرووها را برعکس کنید، به سادگی موقعیت سیمهای + 5V و GND را روی پتانسیومتر مربوطه تغییر دهید.
مرحله 5: کد را دانلود کنید
در این مرحله باید کد ضمیمه شده را در کامپیوتر دانلود و سپس در آردوینو آپلود کنیم.
توجه: اگر قبلاً کد را در آردوینو دانلود کرده اید، فقط از این مرحله رد شوید - چیز جدیدی یاد نخواهید گرفت.
- IDE Arduino را باز کنید و کد را در آن قرار دهید
- در Tools / Board تابلوی خود را انتخاب کنید
- در Tools / Serial Port پورتی را که بردتان به آن متصل است انتخاب کنید. به احتمال زیاد، انتخاب شامل یک مورد خواهد بود.
- روی دکمه آپلود کلیک کنید.
می توانید محدوده سرووها را تغییر دهید، در کدی که من یادداشت هایی در مورد نحوه انجام این کار گذاشتم. به احتمال زیاد، کد بدون مشکل کار خواهد کرد، فقط باید پارامتر سروو دست را تغییر دهید. این پارامتر به نحوه تنظیم موضوع بستگی دارد، بنابراین توصیه می کنم دقیقاً آن را انتخاب کنید.
اگر از مقاومت استفاده نمی کنید، باید کد را در جایی که یادداشت هایی در مورد آن گذاشتم تغییر دهید.
فایل ها
مرحله 6: پروژه را راه اندازی کنید
ربات با حرکات روی جوی استیک کنترل می شود، دست با استفاده از دکمه دست بسته و باز می شود. این ویدیو نشان می دهد که چگونه همه چیز در زندگی واقعی کار می کند.
در اینجا روشی وجود دارد که می توانید دست خود را برنامه ریزی کنید:
- مانیتور سریال را در Arduino IDE باز کنید، این کار نظارت بر روند را آسان تر می کند.
- با کلیک بر روی ذخیره، موقعیت شروع را ذخیره کنید.
- هر بار فقط یک سروو را حرکت دهید، به عنوان مثال، Shoulder up، و ذخیره را فشار دهید.
- عقربه را نیز فقط در مرحله آن فعال کنید و سپس با فشردن save ذخیره کنید. غیرفعال سازی نیز در مرحله ای جداگانه انجام می شود و سپس ذخیره را فشار می دهید.
- وقتی دنباله دستورات را تمام کردید، دکمه پخش را فشار دهید، ربات به موقعیت شروع حرکت می کند و سپس شروع به حرکت می کند.
- اگر می خواهید آن را متوقف کنید، کابل را از برق بکشید یا دکمه ریست را روی برد آردوینو فشار دهید.
اگر همه چیز را به درستی انجام داده باشید، نتیجه مشابه این خواهد بود!
امیدوارم این آموزش برای شما مفید بوده باشد!
ارتباط:
اگر قطعات دستکاری را مطابق دستورالعمل مونتاژ کرده اید، می توانید مونتاژ را شروع کنید مدار الکترونیکی... ما پیشنهاد می کنیم سرووهای دستکاری کننده را از طریق Trerma-Power Shield به Arduino UNO متصل کنیم و سرووها را با استفاده از پتانسیومترهای Trema کنترل کنیم.
- چرخاندن دستگیره اولین پتانسیومتر Trema پایه را می چرخاند.
- چرخاندن دستگیره دومین پتانسیومتر Trema باعث چرخش شانه چپ می شود.
- چرخاندن دستگیره سومین پتانسیومتر Trema باعث چرخش شانه راست می شود.
- چرخاندن دستگیره چهارمین پتانسیومتر Trema باعث به حرکت در آمدن گیره می شود.
کد برنامه (طرح) محافظت از درایوهای سروو را فراهم می کند که شامل این واقعیت است که محدوده چرخش آنها با فاصله (دو زاویه) چرخش آزاد محدود می شود. حداقل و حداکثر زاویه چرخش به عنوان دو آرگومان آخر تابع نقشه () برای هر سروو مشخص می شود. و مقدار این زوایا در طی فرآیند کالیبراسیون مشخص می شود که باید قبل از شروع کار با دستکاری کننده انجام شود.
کد برنامه:
اگر قبل از کالیبراسیون برق را اعمال کنید، ممکن است بازو به درستی حرکت نکند! ابتدا تمام مراحل کالیبراسیون را کامل کنید.
#عبارتند از
تنظیم:
قبل از شروع کار با دستکاری، باید آن را کالیبره کنید!
- کالیبراسیون شامل تعیین مقادیر شدید زاویه چرخش برای هر سروو است، به طوری که قطعات در حرکات آنها تداخل نداشته باشند.
- همه سرووها را از Trema-Power Shield جدا کنید، طرح خود را آپلود کنید و روشن کنید.
- مانیتور پورت سریال را باز کنید.
- مانیتور زوایای چرخش هر سروو را (بر حسب درجه) نمایش می دهد.
- اولین سروو (چرخش پایه) را به D10 وصل کنید.
- با چرخاندن دستگیره اولین پتانسیومتر Trema (پایه A2) اولین سروو (پایه D10) می چرخد و مقدار زاویه فعلی این سروو در مانیتور تغییر می کند (مقدار: A1 = ...). موقعیت های افراطی سروو اول در محدوده 10 تا 170 درجه خواهد بود (همانطور که در خط اول کد حلقه نوشته شده است). این محدوده را می توان با جایگزین کردن مقادیر دو آرگومان آخر تابع map () در خط اول کد حلقه با آرگومان های جدید تغییر داد. به عنوان مثال، با جایگزینی 170 با 180، موقعیت شدید سروو را در این جهت افزایش می دهید. و با جایگزینی 10 با 20، موقعیت اضطراری دیگر همان سروو را کاهش می دهید.
- اگر مقادیر را تغییر دادید، باید طرح را دوباره بارگیری کنید. اکنون سروو در محدوده های جدید تعیین شده توسط شما خواهد چرخید.
- سروو دوم (کنترل چرخش شانه چپ) را به پین D9 وصل کنید.
- با چرخاندن دستگیره ترما پتانسیومتر دوم (پایه A3) سروو دوم (پایه D9) می چرخد و مقدار زاویه فعلی این سروو در مانیتور تغییر می کند (مقدار: A2 = ...). موقعیت های افراطی سروو دوم در محدوده 80 تا 170 درجه خواهد بود (همانطور که در خط دوم کد طرح حلقه نوشته شده است). این محدوده همانند سروو اول تغییر می کند.
- اگر مقادیر را تغییر دادید، باید طرح را دوباره بارگیری کنید.
- سومین سروو (کنترل چرخش شانه راست) را به پین D8 وصل کنید. و به همین ترتیب آن را کالیبره کنید.
- سروو چهارم (سروی کنترل) را به D7 وصل کنید. و به همین ترتیب آن را کالیبره کنید.
کافی است پس از مونتاژ مانیپولاتور یک بار کالیبراسیون را انجام دهید. تغییراتی که انجام دادید (مقادیر زوایای حدی) در فایل اسکچ ذخیره می شود.
سلام!
ما در مورد خط دستکاری روباتیک مشترک روبات های جهانی صحبت می کنیم.
شرکت یونیورسال رباتز که اصالتاً اهل دانمارک است، مشغول انتشار دستکاریکنندههای روباتیک مشترک برای اتوماسیون فرآیندهای تولید چرخهای است. در این مقاله مشخصات فنی اصلی آنها را ارائه می کنیم و زمینه های کاربردی را در نظر می گیریم.
چیست؟
محصولات این شرکت با خطی از سه دستگاه دستکاری صنعتی سبک وزن با زنجیره سینماتیک باز نشان داده می شود:
UR3، UR5، UR10.
همه مدل ها دارای 6 درجه تحرک هستند: 3 قابل حمل و 3 جهت گیری. دستگاه های ربات های جهانی فقط حرکات زاویه ای ایجاد می کنند.
ربات های دستکاری بسته به حداکثر بار مجاز به کلاس هایی تقسیم می شوند. تفاوت های دیگر عبارتند از - شعاع منطقه کار، وزن و قطر پایه.
همه دستکاریهای UR مجهز به سنسورهای موقعیت مطلق با دقت بالا هستند که ادغام با دستگاهها و تجهیزات خارجی را ساده میکنند. به لطف طراحی فشرده، بازوهای UR فضای زیادی را اشغال نمیکنند و میتوانند در بخشهای کاری یا در خطوط تولیدی که رباتهای معمولی جا نمیشوند نصب شوند. مشخصات فنی:
چه جالبسهولت برنامه نویسی
فناوری برنامهنویسی بهطور ویژه توسعهیافته و ثبتشده به اپراتورهای غیر ماهر اجازه میدهد تا به سرعت بازوهای روباتیک UR را با استفاده از فناوری تجسم سه بعدی بصری راهاندازی و کار کنند. برنامه نویسی با یک سری حرکات ساده بدنه مانیپولاتور تا موقعیت های مورد نیاز یا با فشار دادن فلش ها در یک برنامه خاص روی تبلت انجام می شود.UR3:UR5:UR10: راه اندازی سریع
اپراتوری که راه اندازی اولیه تجهیزات را انجام می دهد برای باز کردن بسته بندی، نصب و برنامه ریزی اولین عملیات ساده کمتر از یک ساعت زمان نیاز دارد. UR3: UR5: UR10: همکاری و امنیت
دستکاری کننده های UR قادر به جایگزینی اپراتورهایی هستند که وظایف معمول را در محیط های خطرناک و آلوده انجام می دهند. سیستم کنترل تاثیرات مزاحم خارجی اعمال شده بر بازوی رباتیک را در حین کار پیگیری می کند. در نتیجه، سیستمهای هندلینگ UR را میتوان بدون محافظهای محافظ در کنار ایستگاههای کاری پرسنل کار کرد. سیستم های ایمنی ربات توسط TÜV - اتحادیه بازرسی فنی آلمان تایید و تایید شده است.
UR3: UR5: UR10: تنوع بدنه های کاری
در انتهای دستکاری های صنعتی UR، یک ضمیمه استاندارد برای نصب ابزار کار ویژه ارائه شده است. ماژولهای اضافی از سنسورها یا دوربینهای گشتاور نیرو را میتوان بین بدنه کار و پیوند انتهایی دستکاریکننده نصب کرد. امکانات کاربردی
دستکاریهای روباتیک صنعتی UR امکان خودکارسازی تقریباً تمام فرآیندهای روتین چرخهای را باز میکنند. دستگاه های روبات های جهانی در کاربردهای مختلف خود را ثابت کرده اند.
انتقال
نصب دستکاری های UR در قسمت های انتقال و بسته بندی باعث بهبود دقت و کاهش انقباض می شود. اکثر عملیات انتقال را می توان بدون نظارت انجام داد. پولیش، بافر، آسیاب
سیستم حسگر تعبیه شده به شما این امکان را می دهد که دقت و یکنواختی نیروی اعمالی را بر روی سطوح منحنی و ناهموار کنترل کنید.
قالب گیری تزریقی
دقت بالای حرکات تکراری باعث می شود ربات های UR برای پردازش پلیمر و کارهای قالب گیری تزریقی مناسب باشند.
تعمیر و نگهداری ماشین آلات CNC
کلاس حفاظتی پوسته قابلیت نصب سیستم های دستکاری برای کار مشترک با ماشین های CNC را فراهم می کند. بسته بندی و چیدن
فناوری های اتوماسیون سنتی حجیم و گران هستند. رباتهای UR بسیار قابل تنظیم میتوانند بدون صفحهنمایش محافظ نزدیک یا بدون کارمند در ۲۴ ساعت شبانهروز کار کنند. دقت بالاو عملکرد کنترل کیفیت
بازوی رباتیک دوربین فیلمبرداری برای اندازه گیری های سه بعدی مناسب است که تضمینی اضافی برای کیفیت محصولات می باشد. مونتاژ
یک دستگاه اتصال ساده به ربات های UR اجازه می دهد تا با مکانیزم های کمکی مناسب برای مونتاژ قطعات ساخته شده از چوب، پلاستیک، فلز و مواد دیگر مجهز شوند. پیچ کردن
سیستم کنترل به شما امکان می دهد گشتاور توسعه یافته را کنترل کنید تا از سفت شدن بیش از حد جلوگیری کنید و از کشش مورد نیاز اطمینان حاصل کنید. اتصال و جوشکاری
دقت موقعیت بالای بدنه کار به شما این امکان را می دهد که میزان ضایعات را هنگام انجام چسباندن یا اعمال مواد کاهش دهید.
دستکاریهای رباتیک صنعتی UR میتوانند کار کنند انواع مختلفجوشکاری: قوس الکتریکی، نقطه ای، اولتراسونیک و پلاسما. جمع:
رباتهای صنعتی Universal Robots جمع و جور، سبک وزن، آسان برای یادگیری و استفاده هستند. ربات های UR یک راه حل انعطاف پذیر برای طیف وسیعی از وظایف هستند. مانیپولاتورها را می توان برای هر عملی که ذاتی حرکات دست انسان است برنامه ریزی کرد و حرکات چرخشی برای آنها بسیار بهتر است. مانیپولاتورها با خستگی و ترس از آسیب مشخص نمی شوند، آنها نیازی به استراحت و تعطیلات آخر هفته ندارند.
راه حل های یونیورسال ربات ها به شما امکان می دهند هر فرآیند معمولی را خودکار کنید، که سرعت و کیفیت تولید را افزایش می دهد.
در مورد اتوماسیون فرآیندهای تولید خود با استفاده از دستکاریکنندههای روباتهای جهانی با یک فروشنده مجاز بحث کنید -
 اتوماسیون کنترل سفتی شیر تصفیه منیفولد گاز دیگ بخار
اتوماسیون کنترل سفتی شیر تصفیه منیفولد گاز دیگ بخار اطلاعات مفید در مورد نصب کولر گازی با دستان خود
اطلاعات مفید در مورد نصب کولر گازی با دستان خود پروژه زهکشی سایت: انتخاب مکان، شیب، عمق، عناصر سیستم زهکشی
پروژه زهکشی سایت: انتخاب مکان، شیب، عمق، عناصر سیستم زهکشی