Tee-se-itse sähköskootteri: kuva vaiheittaisesta kokoonpanosta. Kuinka tehdä sähköskootteri omin käsin työkalut ja vaiheittaiset ohjeet Kuinka tehdä sähköskootteri itse
Auton vaihtaminen kotitekoiseen skootteriin sähkömoottorilla kauppamatkoja varten, en vain säästä rahaa, vaan myös nautin sellaisesta "matkasta".
Oikea koko
Ajattelin koota skootterin pieneksi, jotta se olisi sallittu metrossa ja junassa: runko tehtiin kaaren muotoiseksi mahdollisimman lähelle etupyörää ja sitä ympäröiden. Jalkojen tuki asetettiin takapyörän akselille, mikä pienensi rakenteen mittoja entisestään. Otin halkaisijaltaan suuremman etupyörän - kolhujen ja reikien yli ajamista varten ja toin pienemmän takapyörän mahdollisimman lähelle etupyörää, jotta skootteri vei vähän tilaa julkisessa liikenteessä.Kätevä runko

Kehyksenä käytin palaa 200 litran metallitynnyrin reunasta. (katso valokuva, s. 1). sähköhitsauksella kiinnitettiin se toisesta päästä polkupyörän rungon holkkiin, joka sisältää haarukan, ja kiinnitettiin jalkatyyny (2) ja kiinnikkeet takapyörän (3) kiinnittämiseksi vanteen alaosaan vanteen kiinnittämiseksi. takapyörä (3) vahvistaa rakennetta (4)
Sähkömoottori
Ostin sopivan kokoisen pyörämoottorin (5), jonka teho on 350 W ja jännite 36 V. Asensin sen haarukkaan kiinnityskohtaan lukkolevyillä (6). Haarukkaan hitsasin alustan (7), johon asensin laatikon (8) akuille ja pyörän ohjausyksikölle. Skootterin saattamiseksi liikkeelle tarvittiin kolme sarjaan kytkettyä 12 V ja 7 A akkua. Tällaisten akkujen lataus riittää 15 kilometriin. epätasaisessa maastossa ja vähän enemmän tasaisella tiellä.Lataan akut autolaturilla. Laitoin kytkimen ohjauspyörään.
Tärkeä!
Pyörämoottoria asennettaessa haarukkaan kiinnityspaikalle on porattava lisäreiät kiinnitysaluslevyille. Tämä estää pyörän kääntymisen.
Tehokas akku... Ja vaikuttava hinta. Kyllä, on olemassa taloudellisia vaihtoehtoja, mutta voitko kuluttaa vielä vähemmän? Ja jos on, kuinka tehdä sähköskootteri omin käsin?
Mistä aloittaa?
Päätä millä perusteella teet rautahevosesi. On olemassa kolme hyvää, testattua ja totta vaihtoehtoa:
- Ruuvitaltasta... Porat ja ruuvitaltat ovat käteviä, koska akku on erittäin helppo vetää ulos latausta varten. Lisäksi useimmissa malleissa on useita nopeuksia, mikä on myös melko paljon;
- Gyro-skootterista... Erittäin hyvä akun liitettävyyden ja hallinnan suhteen, mutta melko kallis
- Jäähdyttimen jäähdytysmoottorista... Ehkä vaikein vaihtoehto toteutuksen kannalta, mutta moottori on melko tehokas ja melkein ilmainen (sopivan moottorin löydät mistä tahansa automaattisesta analyysistä).
Jos sinulla ei ole paljon kokemusta tällaisista tehtävistä, suosittelemme sähköskootterin valmistamista omilla käsilläsi ruuvimeisselistä.
Lähettää
Oletko valinnut moottorin? Nyt on tärkeää päättää, kuinka siirrät vääntömomentin siitä pyörille. Seuraavat siirtovaihtoehdot ovat käytettävissä:
- Ketju;
- Kitkasuutin;
- Kaksi vaihdetta;
- Kova varuste.
Jälleen: jos sinulla ei ole paljon kokemusta, laita ketju. Vaihtoehto on kiistanalainen, koska ketju voi lentää ja, mutta toteutuksessa se on helpoin tapa.
Pyörät
Kumpi pyörä ajaa: taka- vai etupyörä? Jos valitset takaosan, se on helpompi asentaa, jos etuosa, skootteri on paremmin hallittavissa. Suosittelemme hämmentymään etupyörän kytkemiseen, se kannattaa. Itse pyörät voidaan ottaa yleisimmillä, muovivanteilla. Puutarhakärryjen pyörät toimivat hyvin.
Kehys
Runko on valmistettu tavanomaisista teräsputkista. Profiloitu teräs, jonka paksuus on 2,5 mm, riittää itsetehdylle sähköskootterille, joka kestää jopa 100 kilogramman kuorman.
TÄRKEÄ: Jos teet sähköskootterin ei kokonaan tyhjästä, vaan tavallisen - ei moottoroidun - skootterin pohjalta, sinulla ei ole kysymyksiä rungon ja pyörien kanssa. Valitse vain kestävistä ja vakaista malleista: erittäin sirot mallit eivät välttämättä ole valmiita vakavaan stressiin.

Akku
Älä käytä raskaita lyijyakkuja! Et todennäköisesti pysty työntämään niitä siististi kannen alle, ja akku yksinkertaisesti rikkoo skootterisi koko tasapainon. Jos teet sen ruuvimeisselin pohjalta, ei ole kysymyksiä - käytä omaa akkua - jos ei, niin katso sähköhelikopterit, samat porat ja vastaavat.
Tarvitset myös
- Johdot;
- Virtapainike tai vaihtokytkin;
- Muovinen laatikko akku;
- Kiinnikkeet (yleensä pultit ja mutterit).
Hitsausta tai vastaavia teknisesti pitkälle kehitettyjä kiinnitysmenetelmiä ei tarvitse käyttää.
Kuinka tehdä sähköskootteri omin käsin?
Paras valinta olisi katsoa video YouTubesta ennen työn aloittamista. Etsi erityisesti skootterin kokoonpano valitsemasi moottorin ja valitsemasi vaihteen perusteella - videoita on melkein kaikista olemassa olevista vaihtoehdoista.
Ja joka tapauksessa tarvitset jonkin verran kokemusta käsilläsi työskentelemisestä. Ihanteellinen, jos olet jo työskennellyt sähkön ja metallin parissa. Jos sinulla ei ole kokemusta, suosittelemme ehdottomasti etsimään kokoonpanokumppanin tai ainakin konsultin - henkilön, joka voi tarkastella ideaasi ja projektiasi, kommentoida sitä.
Jos teet kaiken huolellisesti, sähköskootteri omilla käsillä maksaa vain 5-7 tuhatta ruplaa, mikä tarkoittaa, että voit säästää merkittävästi rahaa. Onnea kokoonpanoon!
Tässä artikkelissa kerron sinulle kuinka tehdä tehokas moottori skootterille tai lasten sähköautolle, jolla on korkea hyötysuhde ja yksinkertainen ohjain kotona.

Ensimmäinen asia, joka järkyttää sinut, on se, että tässä moottorissa ei ole rautaa. Staattori- tai roottorilevyjä ei tarvitse leikata laserlaitteissa, koota niitä pusseihin ja säätää koko rakennetta mikronin tarkkuudella. Tämä vaikeuttaa tavallisesti tavallisten ihmisten omien moottoreiden rakentamista. Yllätyt kuinka yksinkertainen suunnittelu on, etkä usko siitä saatuja ominaisuuksia.
Yleensä kun tekee YouTube-haun, esimerkiksi "tee-se-itse sähkömoottori", näet kelan ja magneetin ja se pyörii ja kaikki tietävät sen toimivan, mutta hyötysuhde siellä on mitätön eikä pysty luomaan normaalia pitoa. . Mutta kaikki ovat väärässä, itse asiassa oikean kelan ja magneetin käyttäminen voi tehdä tehokkaan moottorin, jolla on korkea hyötysuhde.
Kuinka kaikki alkoi. Moottoreiden patentteja selaillessani huomasin moottorin kelasta jonka sisällä pyöri pitkä magneettisauva kiinnitettynä akseliin, tämä malli ei yleistynyt tuolloin heikkojen magneettien aiheuttaman alhaisen hyötysuhteen vuoksi. hieman väärä muotoilu. Tulevaisuudessa kerron sinulle, mikä moottorin ideaalin tulisi olla - pallomainen magneetti, joka on kiinnitetty akselille, jonka navat ovat kohtisuorassa ympärillä olevaan akseliin nähden, on pyöreä kela, jonka poikkileikkaus on neliömäinen (akseli kulkee sen läpi, joten se voidaan jakaa 2 osaan ja sijoittaa lähemmäs akselia) - siinä se - rakenne on valmis, on vielä korjattava kaikki kotelossa ja saat kaksitahtimoottorin. Totta, en ole vielä löytänyt tällaista magneettia myynnistä, mutta jos kaikki alkavat valmistaa tällaisia moottoreita, ne ilmestyvät pian.
Nyt myynnissä on magneetteja diametraalisesti magnetoituja sylintereitä, joissa on reikä akselilla, ne ovat melkein ihanteellisia (ei parempia tällä hetkellä), ne eivät yleensä ole halpoja, mutta silti 2-5 kertaa halvempia kuin valmiit moottorit, suurimmat kelat sisällä oleva virta (15A 100-200 kierrosta) älä käännä käsilläsi jo (magneetille, ei akselille, vaan akselille äläkä käännä pihdeillä). Ensimmäinen pelkoni oli, kun käynnistin moisen moottorin skootterissa - rikkooko se vahingossa hammashihnan käynnistyksessä. Eli ymmärrät, että nämä eivät ole samoja lelumoottoreita kelalla ja magneetilla, joita näet YouTubessa.


Nyt tehokkuudesta kaikki osoittautui hyvin yksinkertaiseksi ja ennustettavaksi, kun magneettisylinteri (pallo) käännetään napojen avulla kelan kierroksiin, niin magneettikentän voima vaikuttaa magneetiin tangentiaalisesti, toisin sanoen kohtisuoraan. säde, joka luo maksimivääntömomentin, ja kun sitä käännetään napojen avulla käämin akselia pitkin, momentti on nolla, mikä tarkoittaa, että tässä asennossa, jos virta kohdistetaan kelaan, se menee 100% lämmitykseen ja pyörimisen hyötysuhde = 0%, ja kun se on käännetty napojen avulla kelaan, niin hyötysuhde on maksimi ja riippuu vakaan tilan virrasta tietyllä kuormalla. Esimerkiksi, jos tässä vaiheessa 10 V:n syöttöjännitteellä muodostettiin 1A virta, niin kokonaisvastus (aktiivinen + reaktiivinen) = 10 ohm ja jos samalla itse käämin vastus on 1 ohm, niin hyötysuhde on siinä vaiheessa 90% (ja vastaavasti, jos käämin vastus on 0,1 ohmia, hyötysuhde on 99%). Johtopäätös - käämityksen tulee olla mahdollisimman pienellä resistanssilla ja se on saatava virtaa niistä kohdista, joissa hyötysuhde on maksimaalinen; niitä ei todellakaan voi käyttää, kun magneettia pyöritetään akselia pitkin tai melkein akselia pitkin, koska tämä on 90- 100 % häviö (lämmitys). Ja voit varmistaa tämän, jos kokoat yksinkertaisen ohjaimen kahdelle avaimelle (kaavio artikkelin lopussa) ja käytät ohjausta mikropiiristä melkein mistä tahansa jäähdyttimestä, jossa on 4 lähtöä (jäähdyttimen ohjausohjain, jossa on sisäänrakennettu hall-anturi ja 2 lähtöä, jotka on yleensä kytketty suoraan käämeihin). Hyötysuhde on 55 % (enintään 72,2 % miinus vastushäviöt riippuu moottorin kuormituksesta). Olet luultavasti jo ymmärtänyt kuinka lisätä tehokkuutta, pienentää syöttökulmaa 180 astetta 90 - 45 - 30 - 15, mitä vähemmän tehokkuus on lähempänä 100%, mutta työntövoima laskee. Missä on kohtuullinen raja, käy ilmi, että 180 kulmassa kulutamme 100 W, annamme sen 50-70 W kuormaan, jos pienennämme kulman 90:een, kulutamme 50 W ja annamme sen kuormitus 37 - 44 - (maksimi 89,97 % - häviöt) hyötysuhde on suurempi, mutta lähtöteho pienempi samalla syöttöjännitteellä, 120 astetta (se on samanlainen kuin 3-vaiheinen teoreettinen maksimi 86 % - vastushäviöt). Etsitkö moottoria, jolla on korkea, tasainen työntövoima ja 95 % hyötysuhde? Helposti - ota 6 magneettia yhdelle akselille kelojen tai magneettien kulman siirtymällä 30 astetta, saamme 6-vaiheisen 12-tahtisen moottorin (analogisesti 12-sylinterisen polttomoottorin kanssa), jonka hyötysuhde on enintään 97,2%, joka voidaan myös ohjelmoida uudelleen mihin tahansa muuhun vaihekulmaan ja uhraamalla tehokkuus nostaakseen työntövoimaa tarvittaessa 2 -3 kertaa.
Alla oleva piirros näyttää moottorin suunnittelun ja hall-anturien sijoittelun (esimerkissä hall-anturit on erotettu käämin keskeltä 45 asteen kulmassa, mikä antaa 90 asteen kulman käämien syöttöön, kun magneettinapat ovat mahdollisimman lähellä käämin kierroksia)

Yksivaiheinen kaksitahtimoottorini, jonka syöttökulma oli 110 astetta, antoi 87% hyötysuhteen nopeudella 13 km / h 92 kg:n kuormalla tasaisella tiellä, kun taas käämit liimattiin suljettuun puukoteloon tunnin jatkuvaa ajoa lämmitettynä 41 asteeseen ja keskimääräisellä moottorin kulutuksella 88 W. Kaksi 125 kierroksen käämiä rinnakkain langan kanssa, jonka halkaisija on 0,83 mm, magneetin halkaisija 65, korkeus 30, sisäinen 18 mm linkki. Kuparin summa on 260 grammaa nopeudella 260 wattia. Painoni on 85 kg (skootteri 8 kg moottorilla ja akulla, kevyempi vain hiilestä), virtalähde 10x Samsung INR18650-25R = 87 W / h (enintään 42 V, keskikierre, 2,5 A / h) Minulla riittää täyteen latausta ~ 15 km tasaisella tiellä.
Aluksi käytettiin 1 hall-anturia (mutta tiesin jo, että tämä oli suuri menetys, kuten olin tehnyt sellaisia moottoreita aiemmin), joten moottori kulutti tyhjäkäynnillä 42 W (1 A jokaista akun puoliskoa kohti, yhteensä 2 * 21 tai 1 * 42) ja 2 minuutissa se lämpeni 50 asteeseen (tämä ei ole kuormaa), 2 hall-anturin asennus vähensi tyhjäkäyntivirtaa 10 kertaa! ja se oli 100 mA (4,2 W) ja se lopetti lämmittämisen. Maksimikuormituksella (ylämäkeen ajettaessa) virta saavutti 6 ampeeria (> 250 W) ja käämitys lämpeni niin, että pari minuuttia ei voitu ajaa, ja 2 hall-anturin asennuksen ja virran syöttämisen jälkeen käämit vain oikeilla hetkillä, yllä olevan kuvan mukaan se ratkaisi ylikuumenemisongelman kokonaan (huomattavasti lisääntynyt hyötysuhde) ja virta samasta mäestä ajettaessa putosi 2 kertaa (130 W)
Ja niin magneetit keloilla pakataan koteloon, akseli (M6 100mm pultti, jossa mutterit vanteella, kiinnitys pyörille, magneetti kiinnitetään aluslevyn ja kumitiivisteen kautta) kiinnitetään ei-magneettisiin teräslaakereihin (tämä on ihanteellinen, mutta käytin tavallisia halpoja teräslaakereita, mutta voimamagneettikenttä sellainen, että ne pyörivät vaikeasti, joten on parempi laittaa ruostumaton teräs heti) ja mikä tärkeintä, miten se nyt käynnistyy. Käytin yksinkertaisinta vaihtoehtoa, yhtä kelaa ja yhtä magneettia - halvin vaihtoehto ja sopii tietysti täydellisesti skootteriin, koska toimitamme vain 90 - 120 asteen sektoria sykliä kohden, tyhjiä sektoreita on jäljellä ja tällainen moottori käynnistyy tärinä, mutta tämä ei ole tuuletin ja skootterin moottori, työnnettiin pois, käynnisti moottorin ja ajoi pois, kaikki on yksinkertaista. Jos tarvitset automaattisen käynnistyksen, niin sinun on tehtävä ainakin 2-vaiheinen 4-tahti, laitoin tämän lastenautoon.
Ohjain
Yhdistän lauseen "PWM-säätö" häviöihin, sinun on syötettävä se tasavirralla, jotta vältytään näppäinten kytkentähäviöiltä ja ettei näppäinten diodeja lämmitetä, yleensä ohjain voi toimia 97%: n hyötysuhteella ja korkeampi, jos unohdat PWM: n, ja on parempi säätää nopeutta syöttöjännitteellä (esimerkiksi skootterissani se on kiinteä 13 - 18 km / h riippuen ajajan painosta). Käämityksen syöttäminen kahdella iskulla on mahdollista joko sillalla, mutta silloin häviöt ovat aina 2 avaimella tai puolisillalla virtalähteellä hanalla keskipisteestä, tämä vaihtoehto valittiin, koska se puolittaa näppäinten häviöt ( kela kytkeytyy aina päälle vasta 1 avaimen jälkeen). Toinen tällaisen puolisillan eduista on, että käänteinen emf, kun kela on kytketty pois päältä, valuu 1 diodin kautta vastakkaiseen olakkeeseen ja myös diodien häviöt ovat 2 kertaa pienemmät, eli enemmän energiaa paluuta kondensaattoriin/akkuun myös mäkeä alas vierimisen toipumisesta. Tuloksena saamme puolisillan + puolisiltaohjaimen + ohjauspiirin.
Ohjauspiiri
Yhden onton anturin käyttö ei anna mahdollisuutta ohjata käämin syöttökulmaa, joten tarvitset vähintään 2 anturia, jotka on sijoitettu siten, että käämit kytketään päälle halutulla alueella, helpoin tapa on tehdäksesi 90 asteen kulman (tätä varten anturit pitää sijoittaa 45 asteen päähän kelan kierroksista molemmilla puolilla) niin anturipari riittää 4 kellojaksoon (käytetään vain 2 kpl yksivaiheisiin). Jokainen anturi palauttaa 2 paikkaa eli näkeekö se pohjois- vai etelänavan, joten kun molemmat näkevät pohjoisen, kytkemme yhden avaimen päälle, kun molemmat näkevät eteläisen, käytettäessä jäähdyttimen mikropiirejä - se toteutetaan logiikalla 2 vai ei , kahden logiikkaelementin tuloihin syötetään tehoa lähtöjen vastusten kautta samaan aikaan 0, jäähdyttimen mikropiirit kytkevät logiikkaelementtien tulot nollaan, kun molemmat tulot ovat nollassa lähdössä 1 - 1 näppäin on päällä, ja myös kun toinen näppäin kytketään päälle toisessa logiikkaelementissä, molemmat tulot ovat nollassa. Se on yksinkertaista. Ota huomioon valitessasi jäähdytinohjaimen mikropiiriä (halli-anturi), että ne ovat pysäytyssuojalla ja ilman, tukimoottorille, kuten minun skootterissa, on parempi käyttää sitä suojauksella, se käynnistyy vasta ajon alussa , mutta moottorille, jonka pitäisi käynnistyä itsestään, on valittava ilman suojausta ja tehtävä se tarvittaessa muulla tavalla (esimerkiksi ylivirtasuojaus).
Minulla ei ollut loogisia mikropiirejä, joten vaihdoin sen transistoreihin. MOSFET-ohjaimen kytkentäkaavio tietolomakkeella.

Moottorin virheenkorjaus
Haluan huomata tärkeitä kohtia, jotka säästävät ohjaimen osat vahingossa tapahtuvalta palamiselta. Tosiasia on, että kelan taka-emf on erittäin hankala asia, se voi polttaa koko elektroniikan ja ajurin ja mikropiirit hall-anturilla. Tällaisten tilanteiden estämiseksi tehotulossa tulee olla kondensaattoreita, joihin kelan taka-emf tyhjennetään (mosfettien suojadiodien kautta), jos akku irtoaa vahingossa, vähintään 1000 μF 50V matalalla esr:llä. Lisäksi, jotta korkeat jännitepiikit eivät pääse ohjaimen lähtöön MOSFETin käänteisen kapasitanssin kautta, lähdeporttipiirissä on oltava 13-15 V zener-diodi (joka on pienempi kuin sallittu hilajännite 20 V, mutta korkeampi kuin ohjausjännite 12V ohjaimesta).
Ensimmäistä kertaa käynnistettäessä käämitys on parempi kytkeä maksimivirtaa (10-50 ohmia) rajoittavan resistanssin kautta, kääntämällä Hall-anturit ympäri, saavutamme pyörimisen oikeaan suuntaan. Lisäksi antureita liikuttamalla voidaan löytää asentoja, joissa kulutus joutokäyntinopeudella on minimaalinen ja moottorin toiminta hiljainen. Syöttökulmaa ei kannata suuresti pienentää (< 90 град) для двухтактного двигателя, хоть потребление будет и ниже на холостом но создать достаточную тягу будет сложнее так как в меньшие промежутки времени придется вложить больше мощности а это дополнительные потери на контролере и батарее.
Hinta
- pultti (akseli), mutterit ja aluslevyt (magneetin ja laakereiden kiinnitys), ei-magneettiset ruuvit (ruostumaton teräs, rungon kiertämiseen)< 2$
- kotelo (puu 1,5 m x 80 x 20) = 1,3 dollaria
- vaihteet ja hihna = 8 dollaria
- magneetti = 50 dollaria
- taulut ja kaikki yksityiskohdat< 10$
- 10x Samsung INR18650-25R = 38 $
Yhteensä skootterin sähköistys maksoi ~ 110 dollaria
Hyvät ja huonot puolet
Plussat:
- moottori pyörii ilman vastusta, mikä ei häiritse skootterilla ajoa kuten tavallisella skootterilla, kun virta on katkaistu
- kevyt paino
- korkea hyötysuhde
Miinukset:
- on mahdotonta asentaa tällaista moottoria magneettisten materiaalien lähelle (se johtaa roottorin tarttumiseen, myös rautapulttien käyttö rungossa ei ole hyväksyttävää, vain ruostumaton teräs tai liima)
- ei voida asentaa kovin lähelle kiinteitä johtavia materiaaleja (pyörrevirtajarrutus, mieluiten käytä muovista, puusta tai hiilestä valmistettua runkoa, niin voit laittaa sen mihin tahansa)
- keksi ja kirjoita kommentteihin (pieni nopeus ei rullaa, voit nostaa jännitettä, olen tyytyväinen kävelyteillä ajamisen nopeuteen)
Iso valokuva
Vyön puristaminen saadaksesi paremman otteen hammaspyörästä

Ensin käynnistyy (yhdellä halli-anturilla lisää ja alennettu syöttöjännite 2x8V) maksiminopeus 3-5 km/h

Anturien sijainnin asettaminen (ajellaan, mittaamme kulutusta, liimaamme hall-anturin uudelleen, etsimme parasta vaihtoehtoa) on optimaalinen
Etuosa on vuoristoa, siinä on myös käsijarru. Mitä tulee takaosaan, se käyttää halkaisijaltaan pienempiä pyörää lasten pyörästä. Kirjoittaja sai pyörät käytännössä ilmaiseksi. Paksuseinäisellä metalliputkella luodaan vahva runko, joka ei taipu ihmisen painon alla. Skootterin kokoaminen on melko nopeaa ja helppoa. Riittää, että sinulla on alustavat taidot työskennellä työkalun kanssa.
Materiaalit ja työkalut skootterin valmistukseen:
- aikuisten maastopyörän etuosa;
- takahaarukka pyörällä lasten pyörästä;
- teräslevyt;
- ruuvit;
- pala tukevaa metalliputkea kehyksen luomiseksi;
- jakoavaimet;
- hitsauskone;
- hiomakone;
- pora;
- väriaine.
Skootterin valmistusprosessi:
Ensimmäinen askel. Puramme polkupyöriä
Ensin sinun on hankittava tarvittavat elementit skootterin luomiseksi. Maastopyörästä tarvitset etuhaarukan pyörällä, sinun on myös jätettävä käsijarru. Sinun on otettava hiomakone ja leikattava kehys etuhaarukasta, kuten kuvasta näkyy. Lisäksi on myös toinen vaihtoehto, et voi leikata rungon pohjaa pois, vaan yksinkertaisesti pidentää sitä putkenpalalla, jos se on tarpeeksi jäykkä skootterin luomiseksi.
Mitä tulee lasten pyörän takahaarukkaan, kaikki riippuu suunnittelusta. Jos tämä on myös maastopyörä, haarukka voidaan yksinkertaisesti ruuvata irti. Jos normaalia, sinun on myös työskenneltävä hiomakoneella.
Vaihe kaksi. Luomme rungon ja hitsaamme rakenteen
Kehyksen luomiseksi sinun on otettava metalliputki ja taivutettava se niin, että se on suunnilleen saman muotoinen kuin kuvassa. Putken on oltava vahva, jotta se ei taipu ihmisen painon alla. Putken toinen pää on hitsattu etuhaarukkaan, ja toiseen päähän tekijä hitsaa metallilevyn. Lisäksi takahaarukka on hitsattu tähän levyyn, joten suunnittelu on luotettavampi, koska takapyörällä on suurin kuorma.
Vaihe kolme. Kiinnitä taulu
Jotta skootterilla olisi mukava seistä ajon aikana, sinun on ruuvattava lauta sen runkoon. Näitä tarkoituksia varten sinun on ensin hitsattava 2-3 metallilevyä runkoon ja porattava niihin reikiä. No, sitten levy ruuvataan yksinkertaisesti levyihin ruuveilla muttereilla tai itsekierteittävillä ruuveilla. Laudassa sinun on tehtävä leikkaus, kuten valokuvassa, jotta kehys menee siihen.
Vaihe neljä. Skootterin maalaus
Voit maalata skootterin makusi mukaan. Kirjoittaja käytti kehykseen mattamustaa spraymaalia. Laudassa ja takapyörässä käytettiin kirkkaan vaaleanpunaista fluoresoivaa maalia. Juuri tämä väri meni eniten kirjailijan tyttären sieluun.
Siinä kaikki, nyt skootteri on valmis testattavaksi.
27.09.2018

Kun valitset henkilökohtaisen sähköauton, sinun ei tarvitse rajoittua tyypillisiin tehdasmalleihin. Voit koota itse, omin käsin sähköskootterin, joka vastaa parhaiten olemassa olevia toiveitasi ja tarpeitasi. Tätä varten tarvitset tavallisen skootterin (jalustan), pyörän moottorin, akun ja ohjaimen. Muutosta varten tarvitset myös ohjauselementtejä - jarruvivut, kaasuvivun ja virtakytkimen. Skootterien pohjat on jaettu pyörien halkaisijasta riippuen seuraaviin tyyppeihin:
- mikro - jopa 8";
- mini - 8-10 ";
- keskikokoinen - 12-16”;
- maxi - alkaen 20 ".
Pyörien halkaisijan lisäksi niiden leveys voi vaihdella. Skootteri, Evo ja vastaavat mallit katsotaan myös skoottereiksi, mutta ulkoisesti ja moottorin teholtaan ne ovat enemmän kuin sähköskoottereita. Alustan tyyppi vaikuttaa sähköskootterin suorituskykyyn.
Määritä pyörien koko
Ennen kuin teet sähköskootterin itse, sinun on päätettävä sen suunnittelun ominaisuuksista. Pyörien koolla ja tyypillä (ne voivat olla valettuja tai puhallettavia), jousituksen olemassaolo, moottoripyörän asennukseen tarvittavien hylsyjen koko ja akun sijainti ovat erittäin tärkeitä. Optimaalinen pyörän halkaisija riippuu tien laadusta, joilla aiot ajaa. Vaihtoehto "mikro" soveltuu vain rullaukseen laatoilla ja hyvällä asfaltilla. "Mini" - voit voittaa pienet esteet matkalla. "Midi" antaa sinun ajaa itsevarmasti nopeudella 40 km/h ja sitä korkeammalla, pelkäämättä pieniä kuoppia. "Maxi" on täydellinen niille, jotka pitävät ajamisesta epätasaisessa maastossa ja ongelmallisilla teillä. Jousitus vaimentaa iskuja osittain. Mutta on sääntö - pyörä pystyy voittamaan esteen, joka ei ylitä 1/2 sen halkaisijastaan.
Akun asennuspaikan valinta 
Li-ion-akku voidaan sijoittaa skootterin eri osiin:

Kysymyksessä siitä, kuinka tehdä sähköskootteri aikuisille omin käsin, on monia vivahteita. Joten moottoripyörän koko valitaan pudotusosien leveyden mukaan. Akun valintaan kannattaa kiinnittää erityistä huomiota, sillä sähköskootterin paino, hallittavuus ja kantama yhdellä latauksella riippuvat siitä. Nykyaikaiset sähköskootterit on varustettu litiumakuilla - litiumionikennojen, LiPo- tai LiFePO4-akkujen kokoonpanoilla. Li-ion-kennojen akut ovat kevyempiä ja halvempia, ja LiFePO4 - ne kestävät pidempään eivätkä pelkää pakkasta.
 Kuinka tehdä kattila omin käsin improvisoiduista keinoista?
Kuinka tehdä kattila omin käsin improvisoiduista keinoista?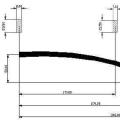 Kuinka tehdä varsijousi: toimistotaistelun heittäminen!
Kuinka tehdä varsijousi: toimistotaistelun heittäminen! Mitä tehdä, jos naapurit varastavat sähköä Mitä tehdä, jos talosta varastetaan sähköä
Mitä tehdä, jos naapurit varastavat sähköä Mitä tehdä, jos talosta varastetaan sähköä